MGDrivE
Agenda
2. The Model [3 minutes]
3. Application [5 minutes]
4. Closing Remarks [1 minutes]
5. Questions [3 minutes]
1. Background
B. Gene-Drive Approaches
C. Hurdles to Overcome
1A. Diseases

1B. Gene-Drive Approaches

1C. Hurdles to Overcome
(from a modelling perspective)
2. MGDrivE
B. Tensor Equations
C. Demo
2A. Modules
2B. Tensor Equations
1) Genetic Inheritance
2) Migration
3) Life History
2C. Demo
3. Application
B. Geography: Yorkeys Knob
C. Experiments: Factorial Sweeps
D. Results: Fixation Response Surfaces
E. Results: Remediation Response Surfaces
3A. Threshold-Dependent Systems
3B. Yorkeys Knob
3C. Experimental Setup
- Time: 3 years
- Households: 943
- Household population: 15 mosquitos (around 14k total)
- Release size proportion: 20 mosquitos
- Releases location selection scheme: randomly uniform
- Gene Drives: Reciprocal Translocations and Threshold Dependent Underdominance
- Releases number: 0 to 20
- Releases coverage: 0% to 100%
- Outcome: Fixation/Dilution
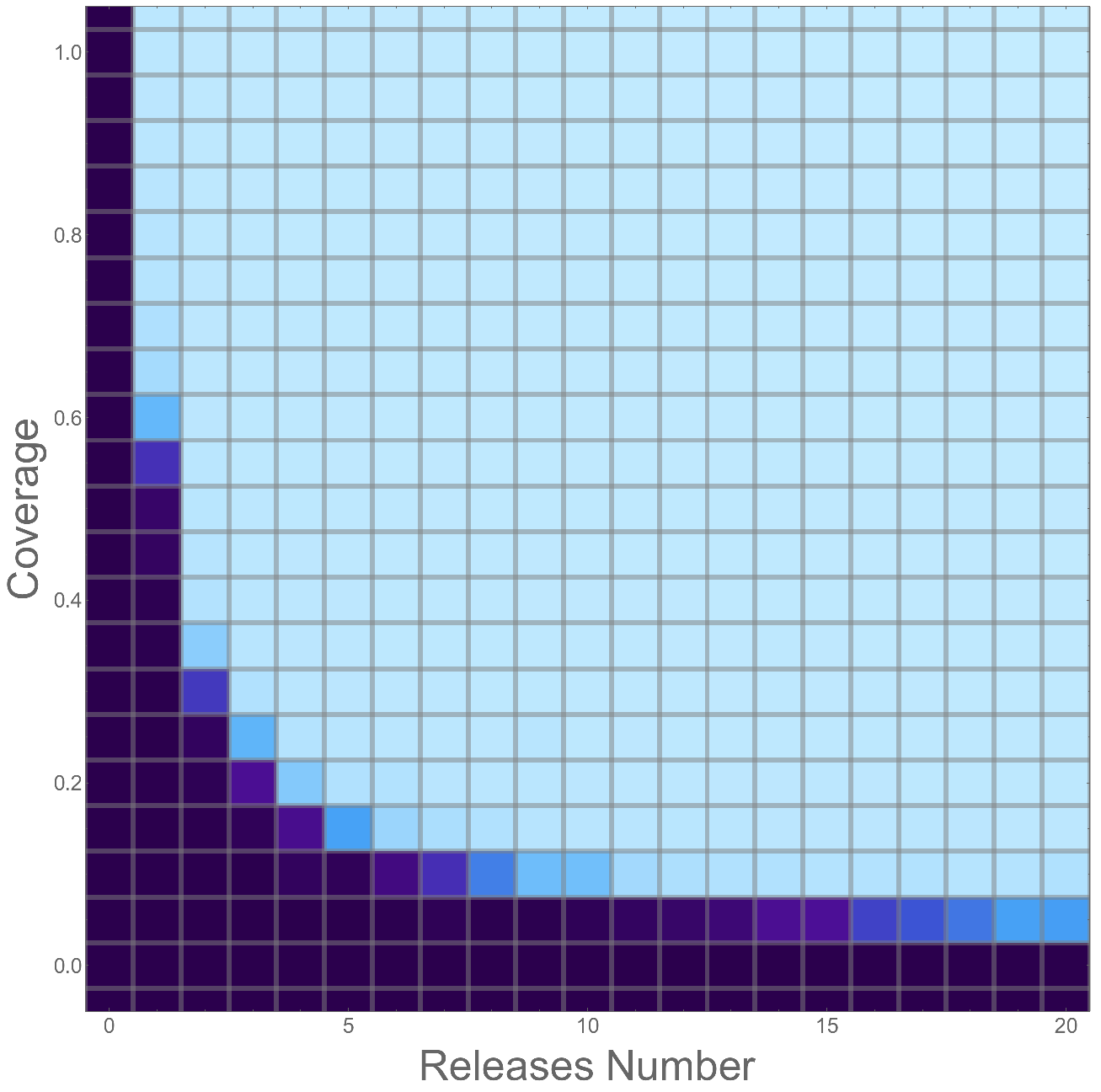
3D. Fixation Response Surface
Reciprocal Translocations
3D. Fixation Response Surface
Threshold Dependent Underdominance
3D. Fixation Response Surface
Translocations VS Threshold Dependent Underdominance
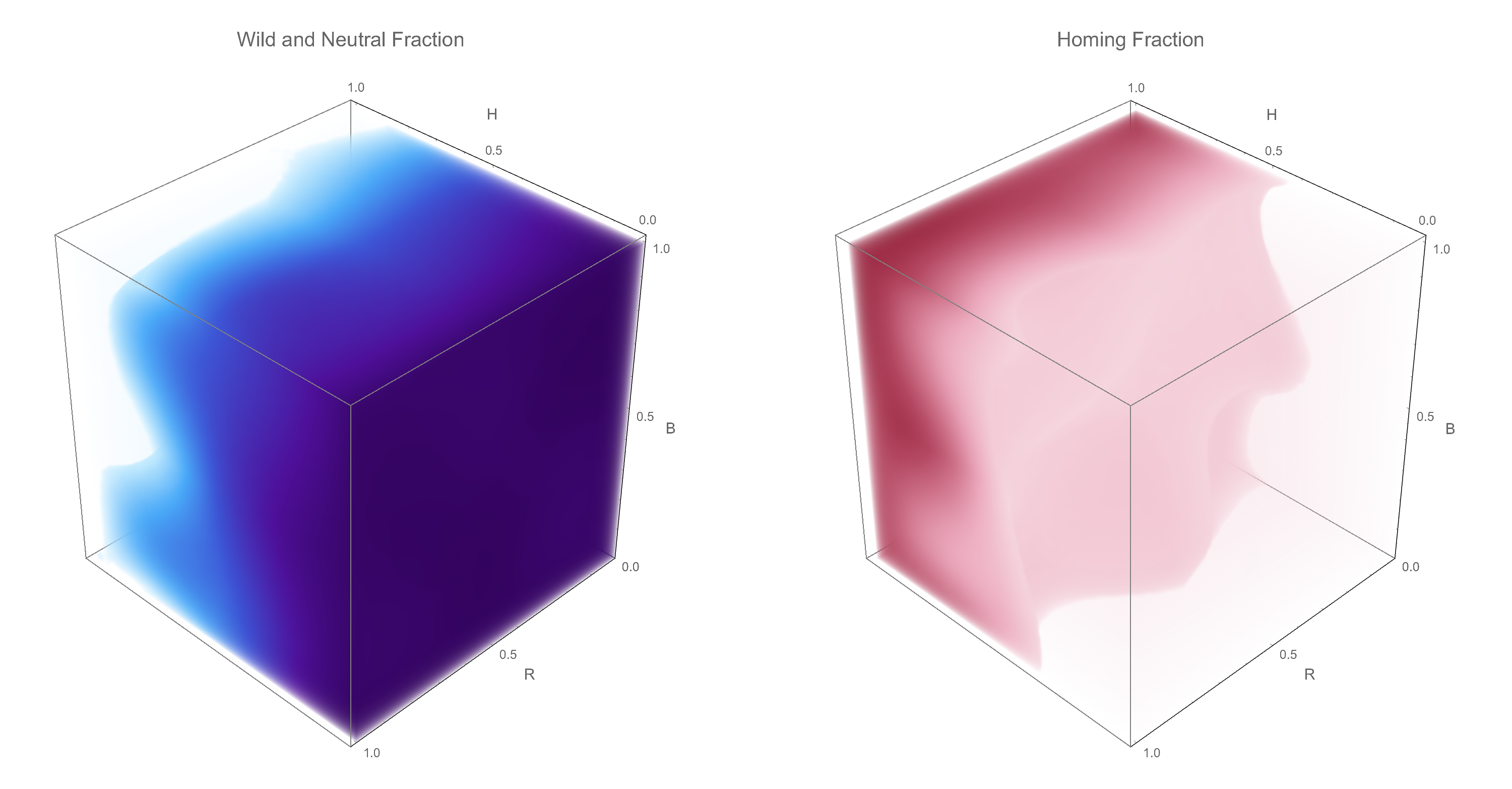
3E. Remediation Response Surface
Threshold Dependent Underdominance
4. Closing Remarks
B. The Team
4A. Conclusions and Future Work
4B. The Team
Developed in: John Marshall's Lab by
Lead: Héctor M. Sánchez C.
Core Dev: Sean L. Wu, Jared Bennett
Environmental Factors: Tomás León
Releases Optimization: Valeri Vasquez
Spatial Analysis: Biyonka Liang, Sarafina Smith, Sabrina Wong
Movement Kernels: Partow Imani
Auxiliary Dev: Chase Violet










Questions
